Es gibt mehrere Methoden,
Beobachtungen bei Hochgeschwindigkeitsflügen
zu simulieren. Eine davon beruht auf der
Aberrationsformel (Gleichung 3)
und besteht im Prinzip aus den folgenden Schritten.
Man beschreibt ein Objekt durch
Punkte auf seiner Oberfläche.
Besonders einfach ist die Objektdefinition
bei Drahtmodellen,
die durch Linien definiert sind, die sich
jeweils als Polygonzug durch eine Reihe von Punkten
approximieren lassen.
Man legt die Geschwindigkeit und
die Blickrichtung der Kamera fest und
wählt den Ort, an dem die Kamera
ausgelöst wird.
Für jeden Objektpunkt
bestimmt man den Winkel θ,
den ein Lichtstrahl vom Objektpunkt
zur Kamera mit der Bewegungsrichtung
der Kamera einschließt (Bild 9).
Die Aberrationsformel liefert den
Winkel θ',
den derselbe Lichtstrahl
im Ruhesystem der Kamera hat.
Im Ruhesystem der Kamera berechnet
man aus der Richtung des einfallenden Lichtstrahls
und der Ausrichtung der Kamera
den Auftreffpunkt in der Bildebene.
(Wenn man sich auf eine Kamera
mit Blick in Flugrichtung beschränkt,
kann man anstelle der Schritte 3 und 4
auch die Bildpunkte
anhand von Bild 9
aus der Lichtlaufzeit in der Kamera berechnen.)
Aus den Bildpunkten wird der verzerrte Anblick
des Objekts konstruiert.
Bei Drahtmodellen verbindet man dazu die Punkte,
die zu einer Linie gehören, durch einen
Polygonzug.
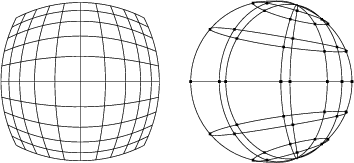
Bild 11
zeigt zwei Beispiele. Simulationen
von Drahtmodellen erlauben es
mit einem relativ geringen Programmieraufwand
mit verschiedenartigen Objekten
zu experimentieren.
Bild 11:
Simulierter Anblick von Drahtmodellen
bei 90% der Lichtgeschwindigkeit.
Links: die Kamera nähert sich einem
ebenen quadratischen Gitter, Blick in Flugrichtung.
Rechts: die Kamera fliegt an einer Kugel
vorbei, die durch Längengrade und
Breitenkreise beschrieben ist, Flugrichtung nach rechts,
Blick senkrecht zur Flugrichtung.